
学院多智能体研究与应用团队在中科院一区TOP期刊IEEE TIE发表高水平论文
近日,我院多智能体研究与应用团队在控制科学领域顶级期刊IEEE Transactions on Industrial Electronics(IEEE TIE)发表题为《Real-Time Formation Planning for Multi-robot Cooperation: A Neural Informatics Perspective》的研究论文。该论文第一作者为团队研究生王霆磊,通讯作者为廖柏林教授。IEEE TIE为中科院一区TOP期刊,在控制科学和计算机科学领域享有极高的声誉和影响力。
该团队由廖柏林教授领衔,长期聚焦于多智能体系统协同控制与智能优化方法的研究,致力于将神经动力学理论应用于智能体集群、分布式智能系统等前沿方向。此次发表的研究成果,围绕多智能体编队规划这一关键问题展开,在智慧交通、无人集群、灾害搜救等实际场景中具有重要应用前景。
针对现有方法在复杂噪声环境下存在的精度不足、收敛速度慢、鲁棒性差等问题,团队提出了一种创新的基于神经控制器的编队规划方法,构建了具备抗噪性与固定时间收敛能力的噪声鲁棒固定时间零点神经网络(NT-FTZNN)控制器。该方法首次将同时具备强噪声适应性与固定时间收敛特性的神经控制器应用于多机器人编队任务,能够在恒定噪声、动态有界噪声乃至动态无界噪声等复杂干扰条件下实现高精度稳定收敛。实验结果显示,该方法的最终编队误差可收敛至10⁻⁷数量级,远优于当前主流先进方法普遍达到的10⁻²数量级。此外,研究还通过严密的理论推导证明了控制器在多类噪声条件下的全局稳定性与固定时间收敛性,并结合大量仿真与实车实验进一步验证了其工程可行性与实际鲁棒性。值得一提的是,为了验证算法的工程实用性,团队自主设计并搭建了多智能体协同控制物理实验平台,实现了算法在真实硬件系统中的部署与运行,充分体现了理论创新与实际应用的紧密结合。
此次研究成果的发表,不仅展示了吉首大学多智能体研究与应用团队在神经网络控制与多智能体系统研究领域的原始创新能力,也标志着吉首大学在智能系统控制方向的科研影响力持续提升。
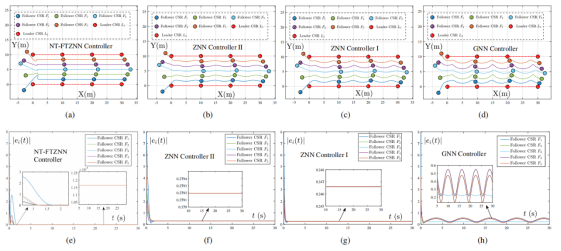
仿真实验结果
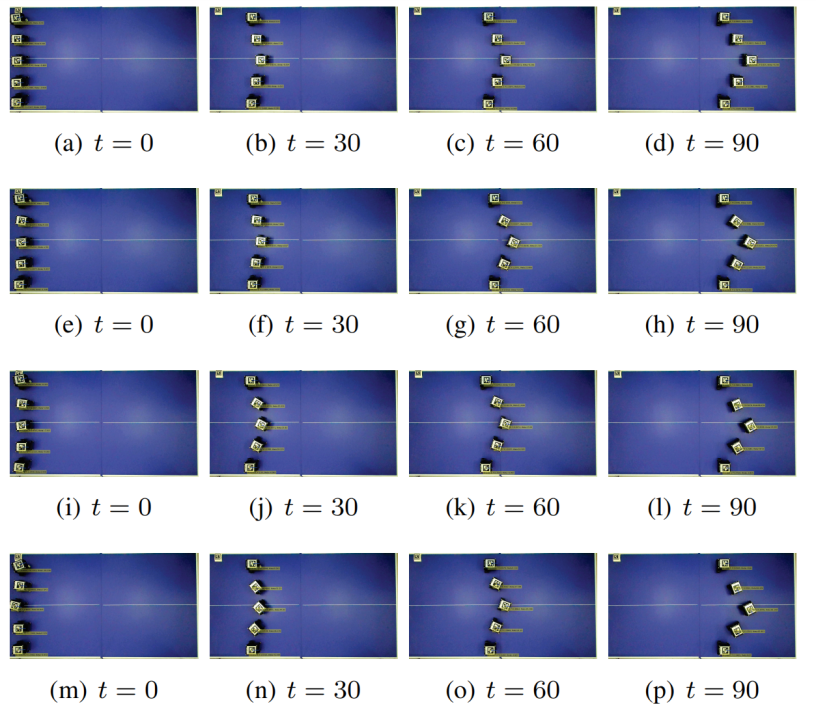
物理实验结果
论文链接:https://ieeexplore.ieee.org/document/11095297